協調して動く球体ロボット群「FreeBOT」 くっついたり離れたり、転がったり壁を登ったり :Innovative Tech
今回は「協調して動く球体ロボット群「FreeBOT」 くっついたり離れたり、転がったり壁を登ったり :Innovative Tech」についてご紹介します。
関連ワード (内部車輪、同士、強磁性体等) についても参考にしながら、ぜひ本記事について議論していってくださいね。
本記事は、It Media News様で掲載されている内容を参考にしておりますので、より詳しく内容を知りたい方は、ページ下の元記事リンクより参照ください。
Innovative Tech:
このコーナーでは、テクノロジーの最新研究を紹介するWebメディア「」を主宰する山下裕毅氏が執筆。新規性の高い科学論文を山下氏がピックアップし、解説する。
中国・香港中文大学の研究チームが開発した「」は、平面を転がり壁や斜面を登るソフトボールより少し大きいくらいの球体ロボットだ。ロボット同士はくっついたり離れたりし、協力してさまざまな形状や動きを生み出す。
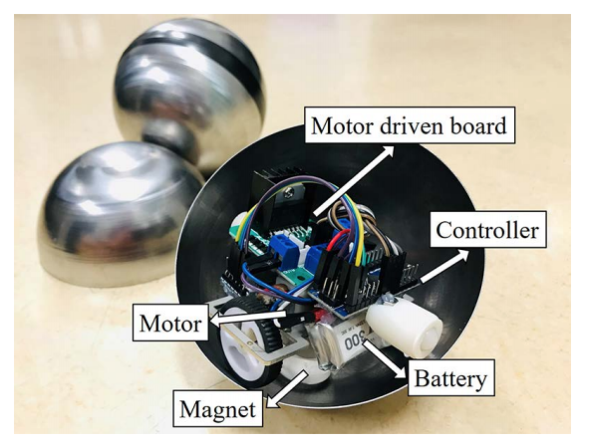
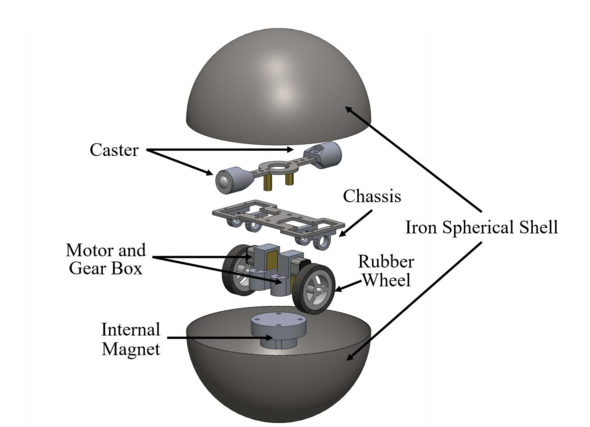
FreeBOTモジュールは内部に磁石を備えた球形ロボットで、強磁性体である鉄製の球殻と内部駆動機構の2つの部分で構成。内部駆動機構は2つの車輪を整備し、ギアを介して2つのDCモーターで駆動する。モーター制御により球殻内での内部車輪の位置を変更し、単独で平面上を転がる。強力な内部磁石により、強磁性の壁であれば垂直方向の移動も可能だ。
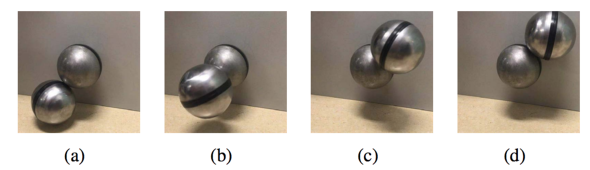
内部の磁石は小さいが、強い外部磁場を作り出せる。その磁場に引き付けられるように他のモジュールを統合し、統合後もモジュールに沿って移動する。モジュールのほぼ全体が接触点であることから、統合されたロボット群はさまざまな形状で動く。
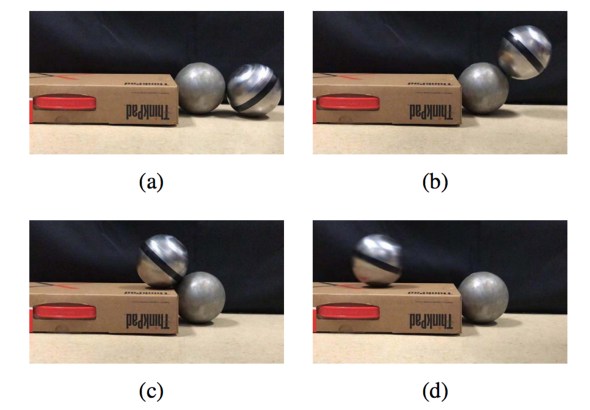
例えば、強磁性ではないダンボールの段差を2台のロボットで協力して上がる、他のモジュールをはしごのように登っていくといった動きが可能だ。
今回は遠隔操作で動かしているが、将来的には自律システムを実装したいという。
Copyright © ITmedia, Inc. All Rights Reserved.